Unearther
Before the season
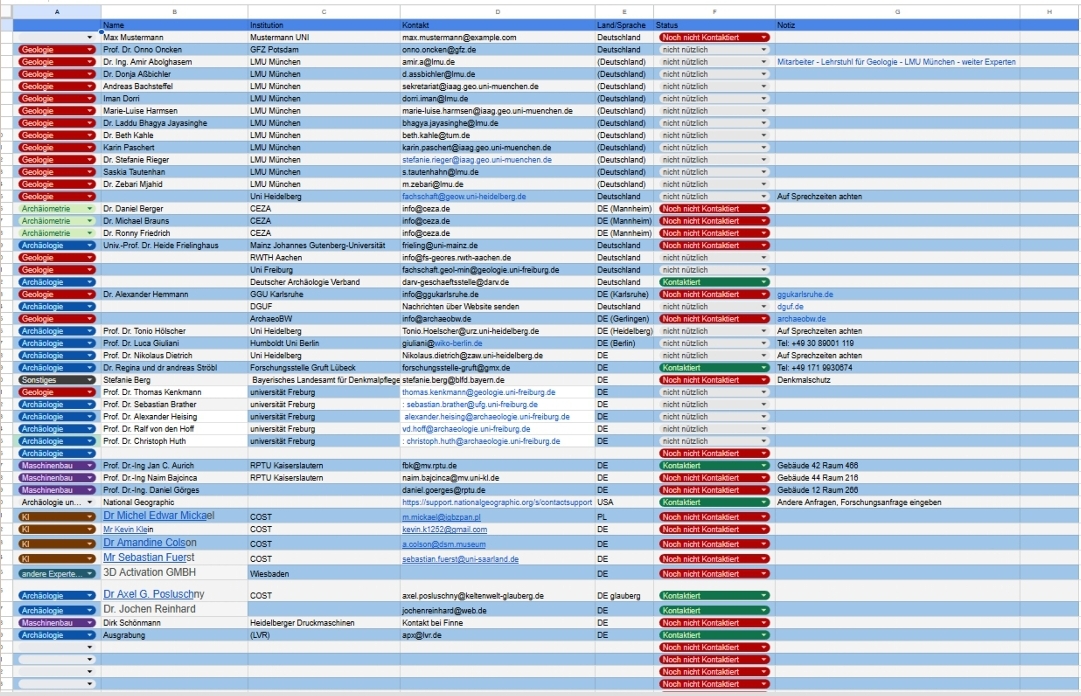
Before the season even started we could search for experts using the season teaser. We created a sheet with all different experts (mostly archaeologists), so when the season started we only needed to contact the right ones.
Idea finding
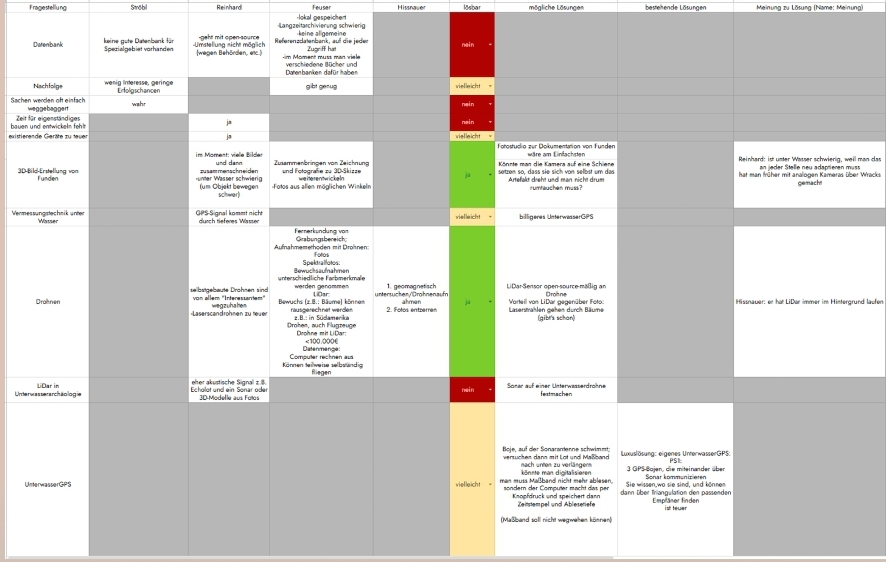
We manged to talk to a lot of archaeologists and we even went to an excavation in Landau. There were many good ideas, but finally we decided to built an autonomous excavation robot that helps archaeologist dig out artifacts.

More experts
To build the Unearther we asked mechanists, ai-experts and more archaeologists for help. They told us about houses that were fully 3D-printed and ai's perfectly suited for deteckting objeckts.


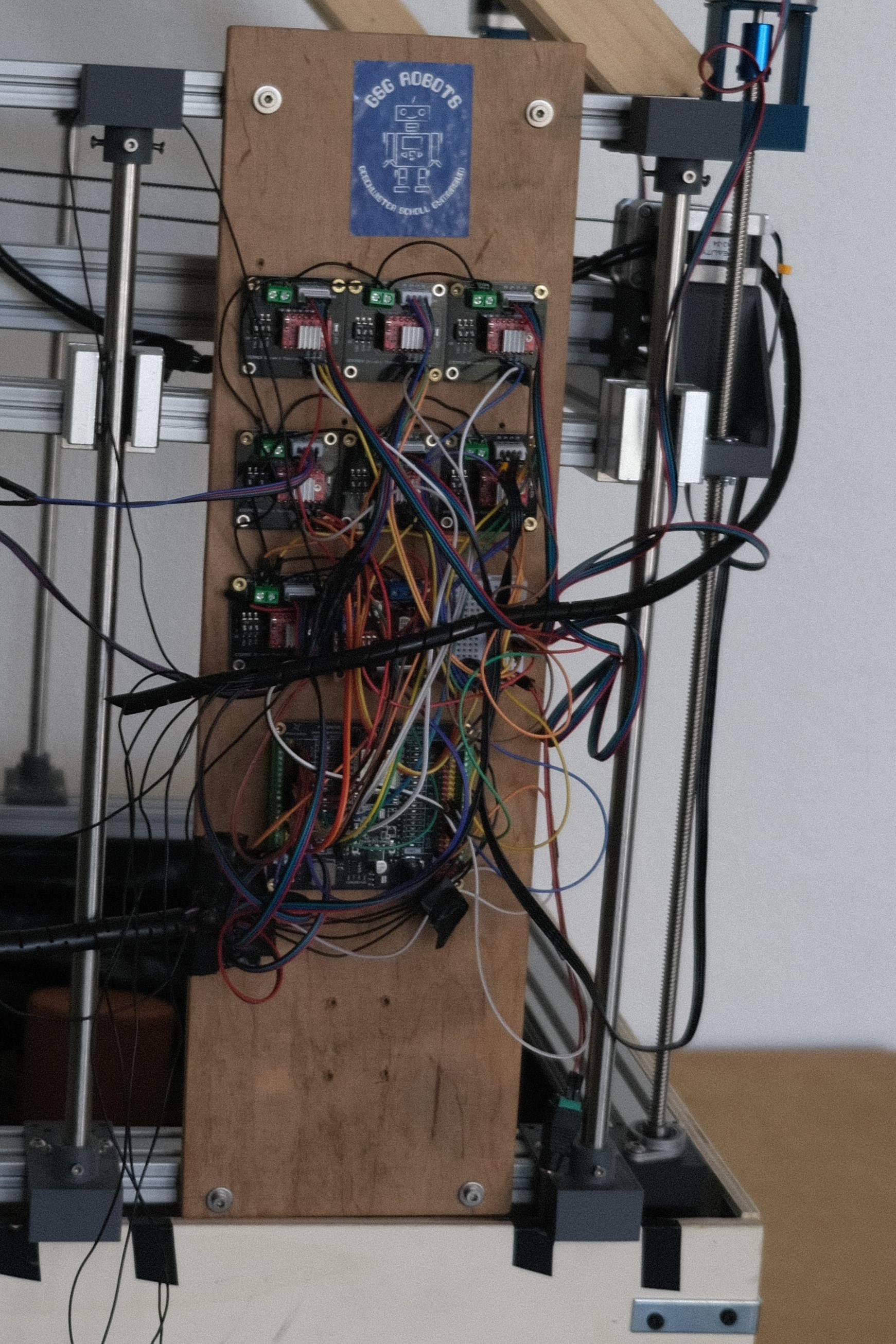
The Building process
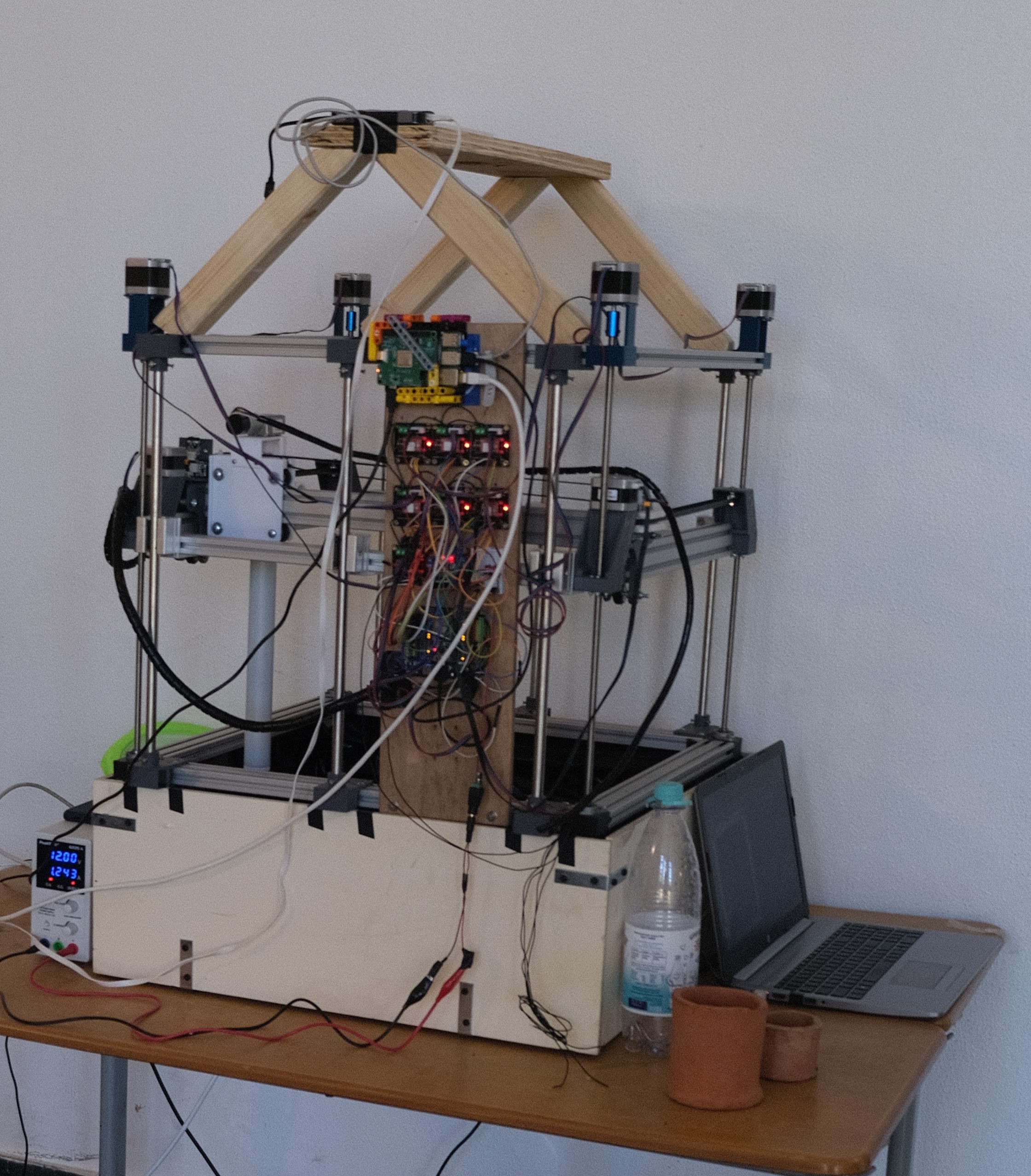
Before we started building, we made a plan and bought the needed parts. In this time we also started to design the parts we need to 3D-print. In the christmas we could finally meet to assemble the Unearther.

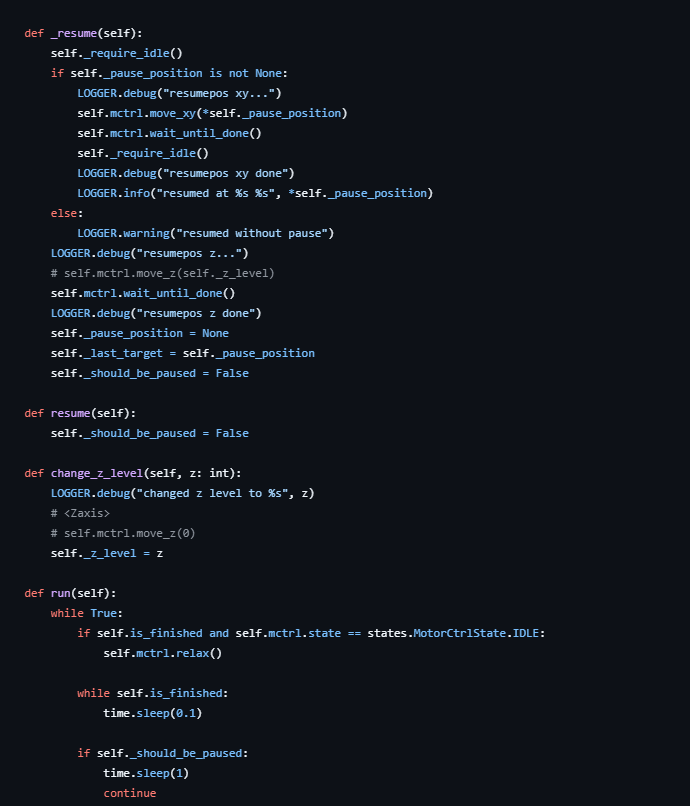
The Code
After we succesfully built our robot we needed to programm it. There were all kinds of problems with the ai and the communication between the RasberryPi and the Esp32. But we managed to deal with quite, just the ai still caused us headaches. In this time we also began building a full webapp.
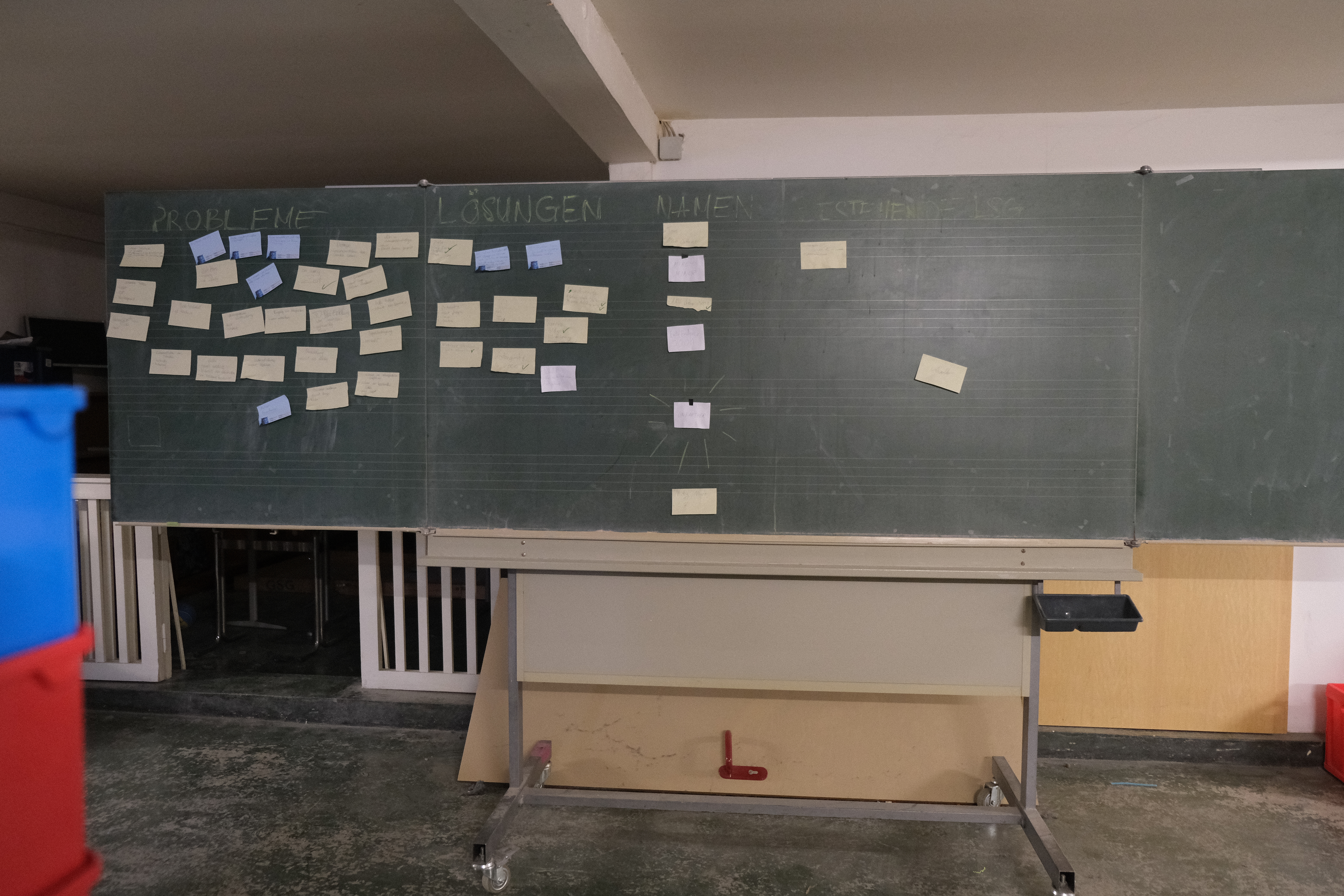
The Problems
A big propblem was our drill head. Originally we wanted to make a 3D-printed gearbox, but the motor we used was to fast and destroyed it. So our only option was to use a Spike Prime as motor. Another problem was the Z-Axis. We originally only used two motors for it, and connected all worm gears with belt drives. It was not easy to get all edges aligned and the belt drives just at the right tension.
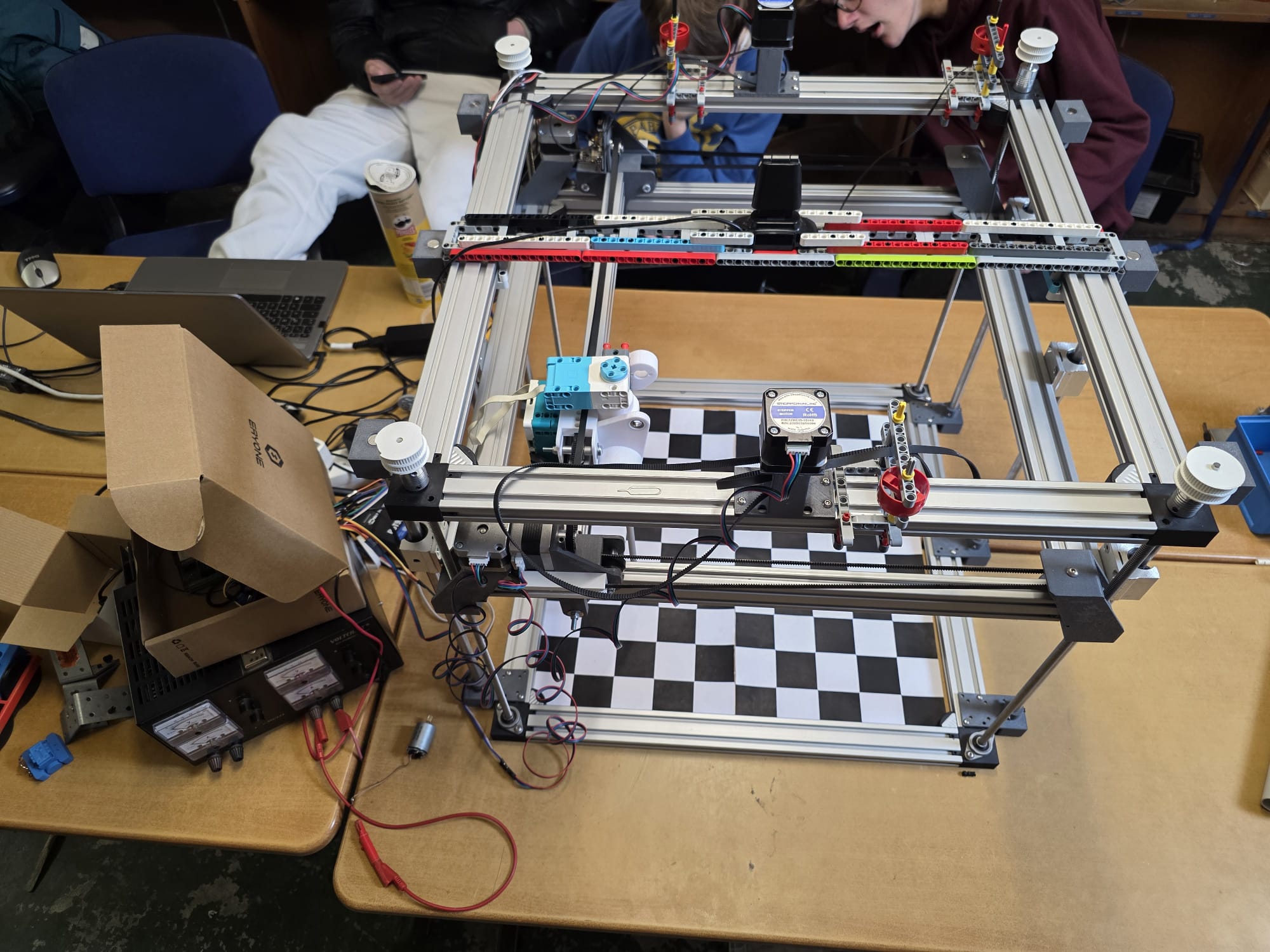

After national qualifiers
To fix our drill head, we purchased a new motor with a built in resistance sensor to check if we hit artifact. Additionally we switched our stepper-driver and could now control four motors for the Z-Axis.